Testing in sim: Failure discovery with sampling-based techniques
Project Website Conference Paper/Letters Journal Paper (related project)
Sampling methods are inefficient in high-dimensional and low volume exploration. Using a data-driven model to predict failures will only return failures that are observed in training data. Using such models as a pre-processing step, and combining with sampling methods allows generalizability beyond training data due to exploration and mitigates the drawbacks of sampling methods.
Neural Projection Operator (NPO) for low volume exploration for finding obstacles for collision
We consider falsification of MPPI by placing obstacles on Autorally racetrack for collisions. The track is a region of low volume, but the boundary for the track can be learnt easily using synthetically generated data. We use a NPO to project samples within the track, and apply 2nd order Langevin to generate obstacles for failure. 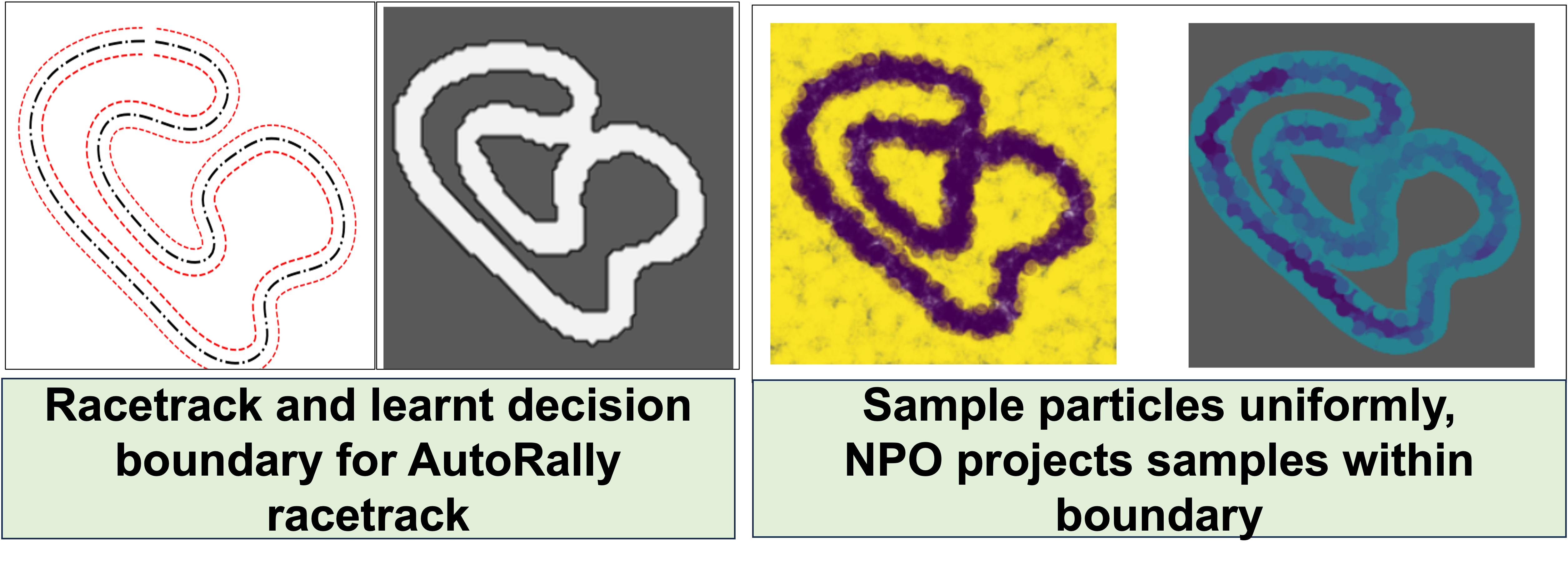
Examples of obstacle locations observed using our method tested on the track 
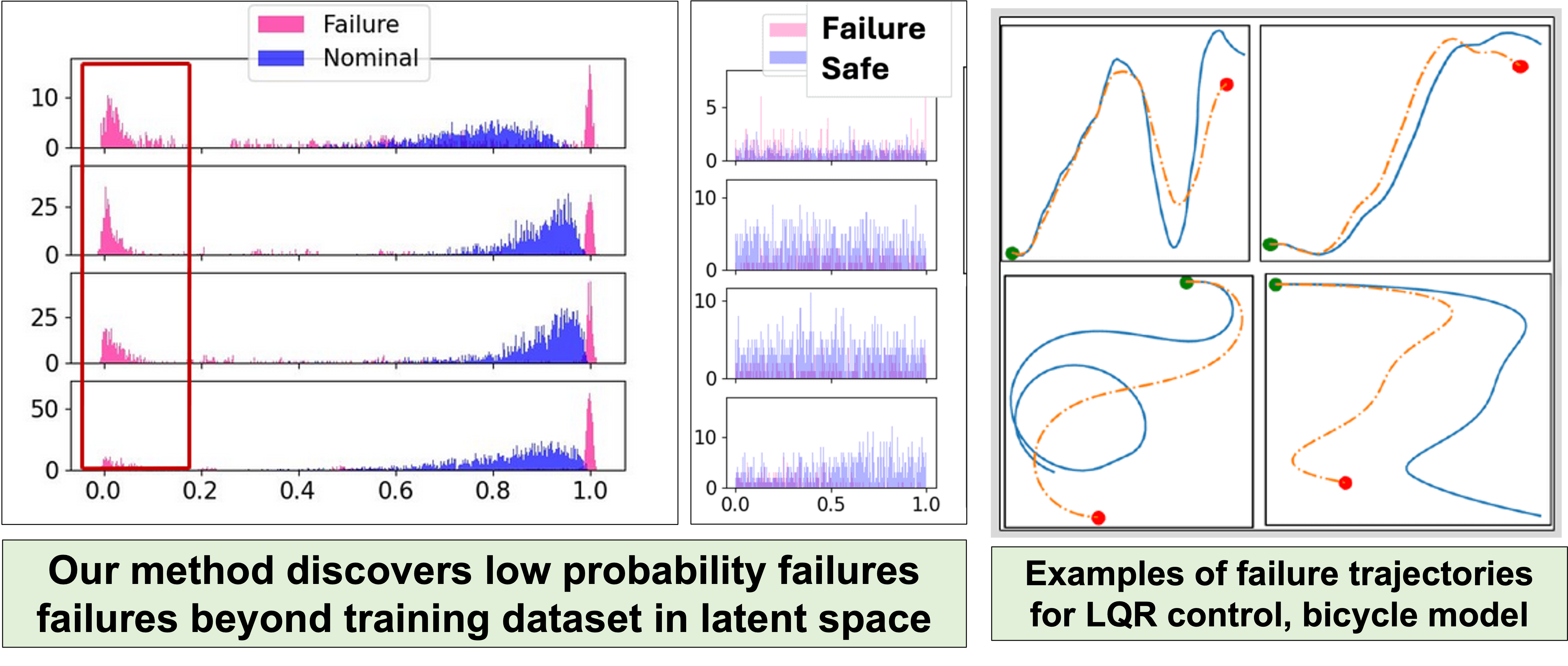
VAE for low dimensional latent space exploration to generate failure trajectories
We use a VAE to learn a nominal low-dimensional representation of trajectories, and sample falsifying trajectories in the learnt stationary latent space to falsify LQR trajectory tracking controller on F1-Tenth. 
Using sampling allows us to go beyond what we have observed in training data and discover newer failures.