Testing in Sim and Real: Failure prediction using both sources
Project Website Workshop Paper, Talk
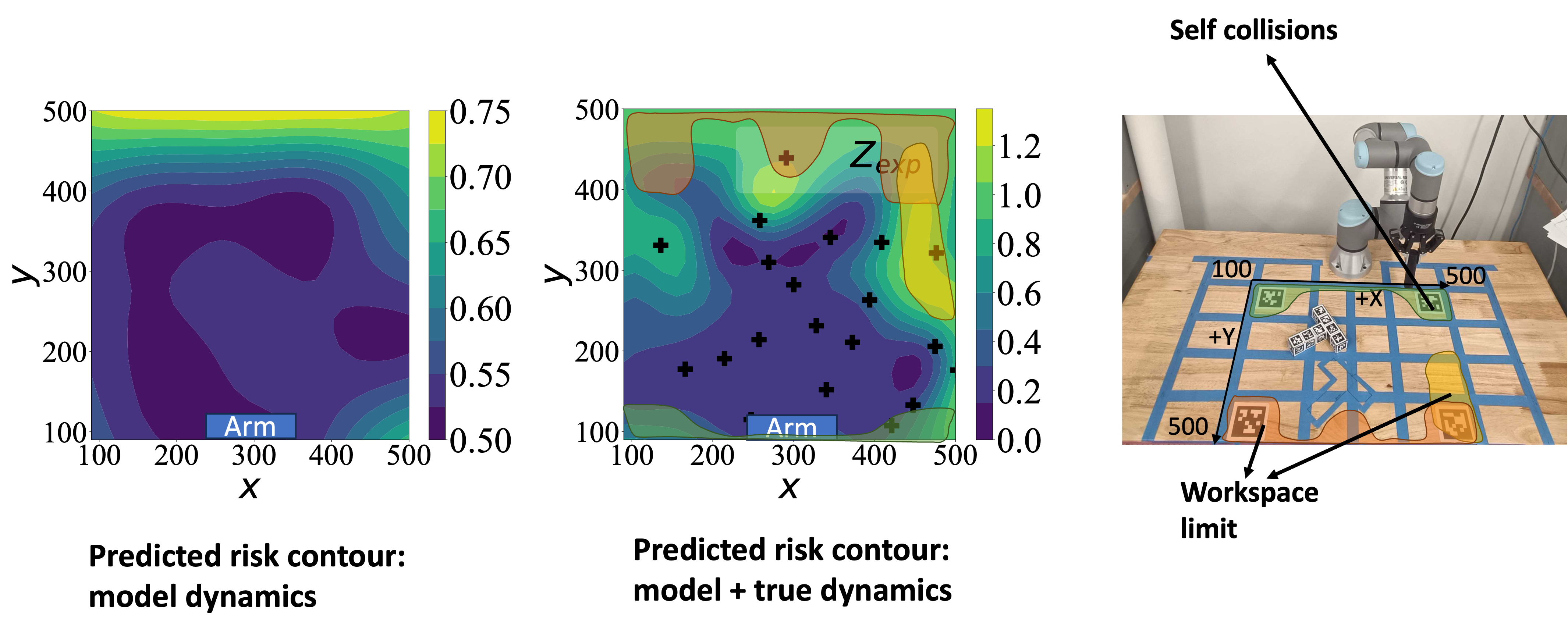
Sim to real gap leads to failures that cannot be discovered by extensive sampling based techniques alone. Here, we investigate combination of sampling methods and active learning with Gaussian processes (GPs) to learn failure prediction models. 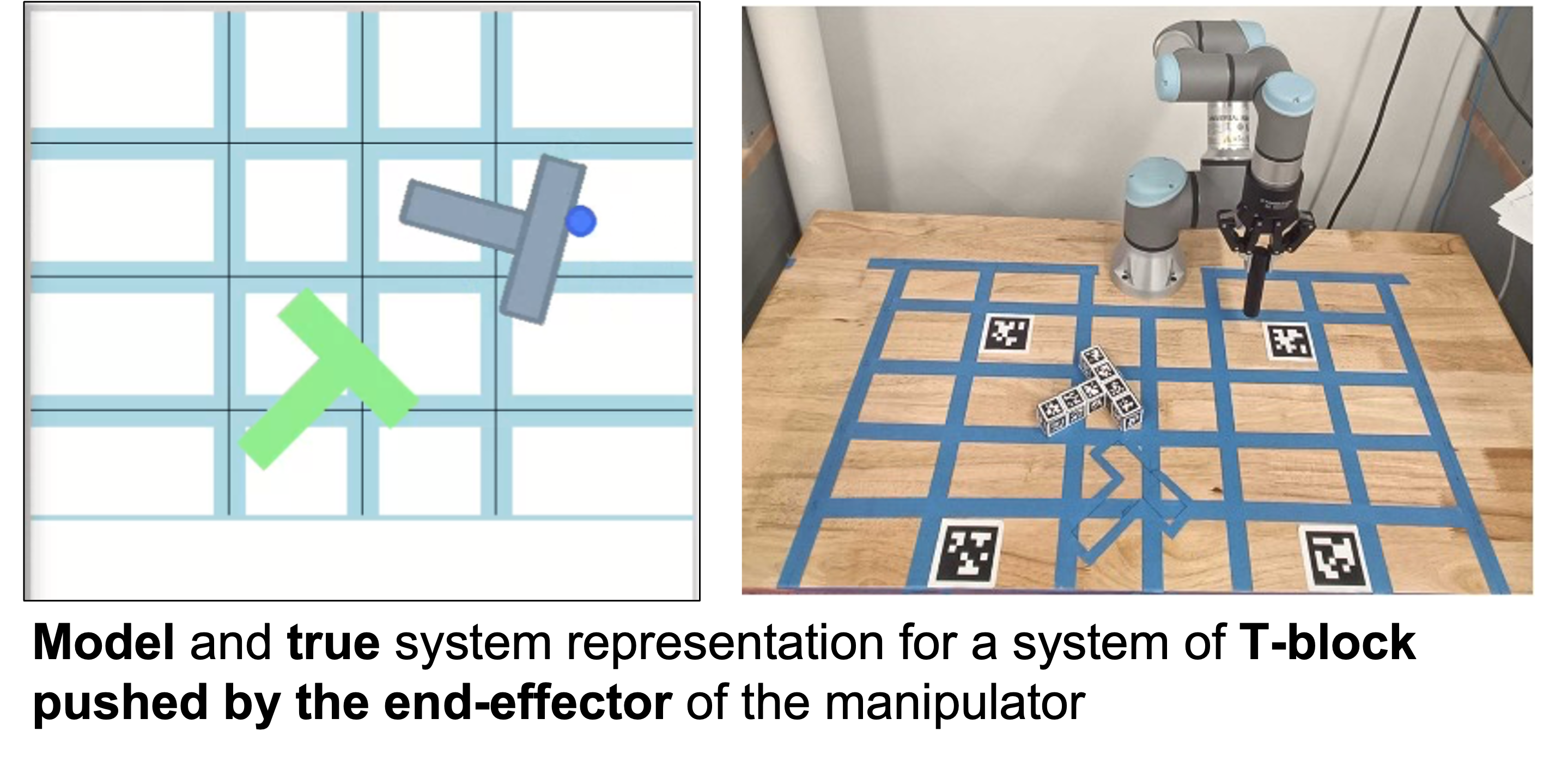
We first sample failures using MC sampling in simulation, and learn the boundary between fail and safe using a Normalizing Flows based classification. This is followed by a projection in the latent space to sample exclusively from predicted ‘safe’ regions in sim. This is our testbed for failures in real system. 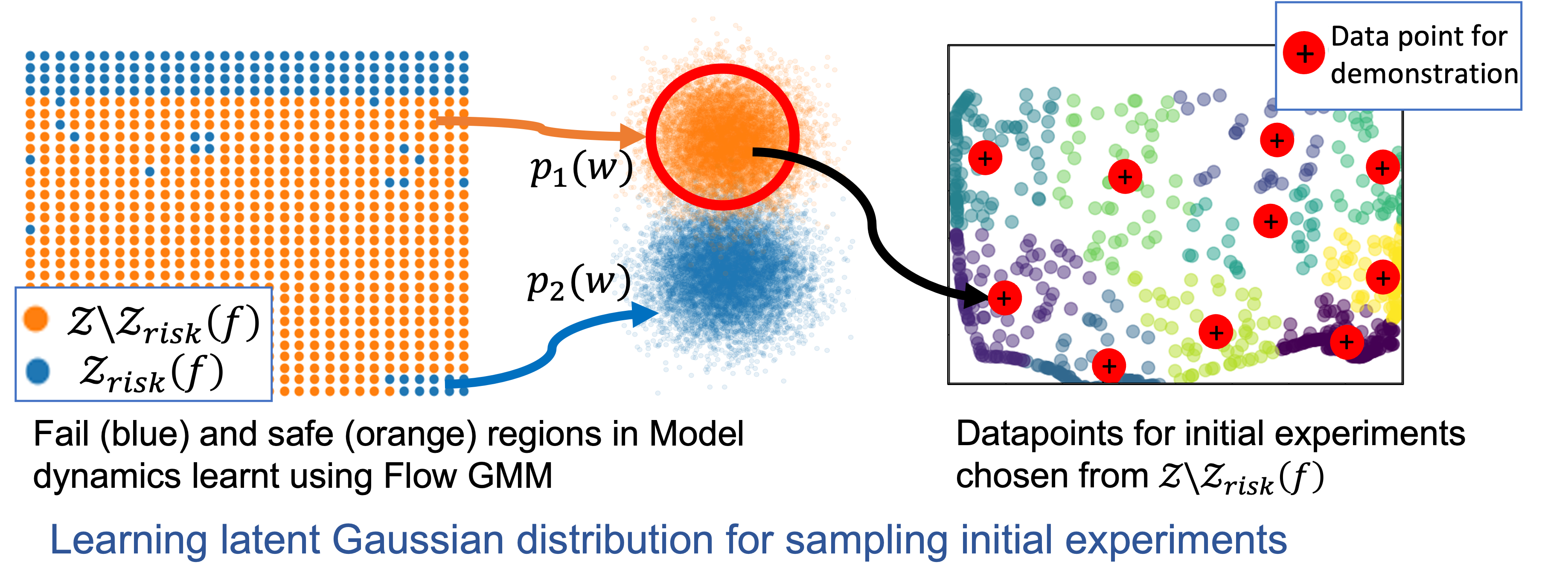
We use Gaussian Processes, while collecting data sequentially from the ‘safe’ region in sim, and optimizing a coverage metric to validate safety of real-world system. 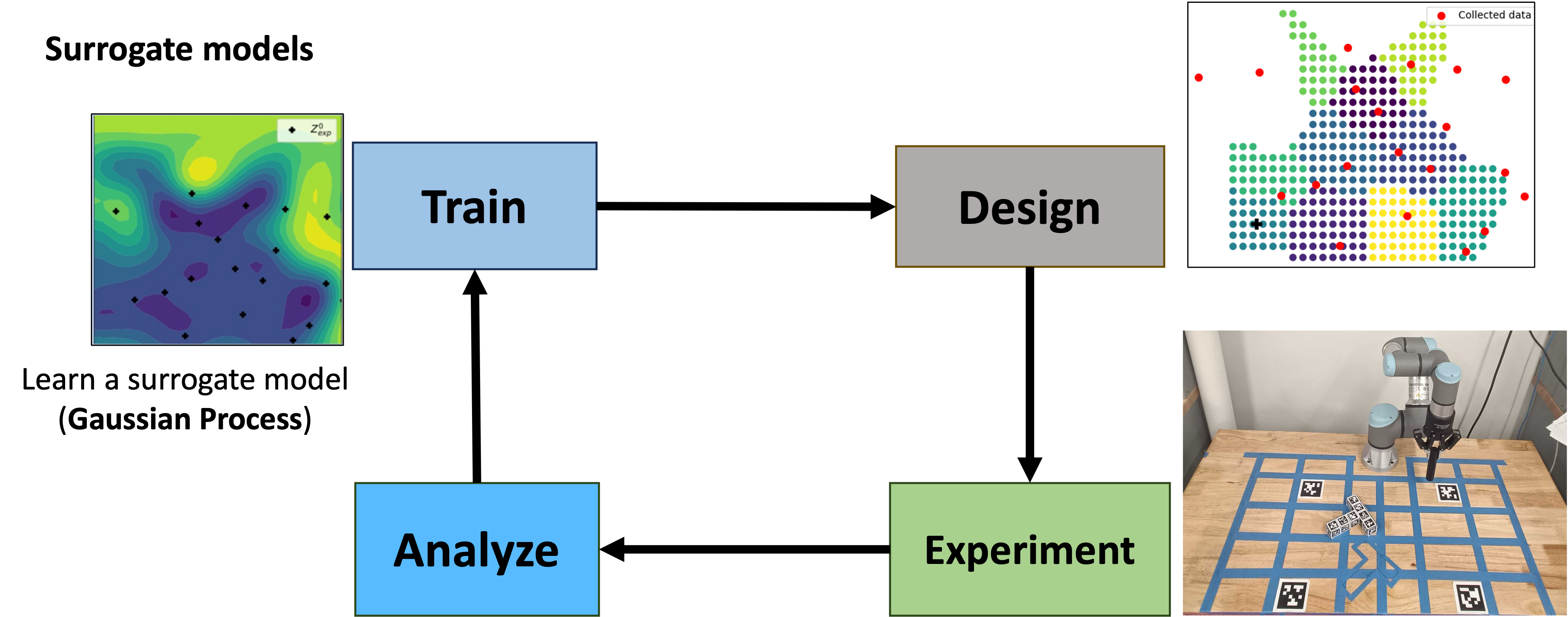
Our method enables efficient discovery of failures that cannot be observed in sim